











 para velocidades de 1 terabit por segundo")
















Su nombre puede resultar confuso, pero la verdad es que los sensores inductivos no miden la inductancia. En su lugar, utilizan la inducción electromagnética de un campo magnético en un objetivo metálico junto con las conocidas propiedades de un transformador de núcleo de aire y la ley de Faraday para localizar con precisión la perturbación de este campo magnético por parte del objetivo. Puede parecer complicado para muchos de nosotros que hemos olvidado todo lo que aprendimos sobre la teoría del campo electromagnético en la escuela. Sin embargo, en pocas palabras, los sensores inductivos miden la perturbación de un campo magnético por un objetivo conductor.
Además, este campo magnético no es generado por un imán permanente, que es necesario para los sensores de efecto Hall y los sensores magnetorresistivos. En cambio, es generado por el devanado primario de un transformador.

Se usan dos bobinas secundarias para detectar este campo magnético y, al igual que con un transformador, usamos la ley de Faraday para convertir este campo en voltaje. Un objetivo metálico colocado en este campo magnético inducirá corrientes parásitas que se oponen al campo magnético y reducirán la intensidad del campo a cero en el objetivo. Al colocarse en diferentes ubicaciones físicas, las dos bobinas receptoras detectarán un voltaje diferente. La posición del objetivo se puede calcular simplemente calculando la relación de estos dos voltajes de bobina de recepción.
Precisión de los sensores inductivos:
Los sensores de posición inductivos son muy precisos, sobresaliendo a temperaturas más altas donde otros sistemas basados en imanes tienen problemas. La gran razón de la precisión de los sensores de posición inductivos es que no se basan en la naturaleza no lineal del imán permanente. En cambio, solo buscan la perturbación del campo magnético autogenerado.

Por ejemplo, el sensor de posición inductivo excitará el campo magnético a una frecuencia entre 1 y 6 MHz, pero utiliza un oscilador LC. Aunque ambas cantidades pueden cambiar con la temperatura, esto no tiene ningún impacto en la posición. La razón es que los canales de recepción secundarios utilizan demodulación síncrona, que es una función del oscilador primario. Esta deriva no tendrá ningún impacto en la amplitud de las señales recibidas. Aparte de la temperatura, los objetos metálicos cercanos al sensor pueden afectar el campo magnético.
Por lo tanto, se pueden lograr errores por debajo de ± 0,1% en todo el rango de medición a temperatura ambiente. Se pueden lograr errores por debajo de ± 0.3% sobre temperatura y con variaciones de espacio de aire entre el objetivo y el sensor. Además, el algoritmo completo está diseñado para eliminar la variación de temperatura o minimizar su efecto.
Se requiere cierto nivel de calibración, pero la calibración no cambia con la temperatura. Por ejemplo, el LX3302A de Microchip Technology utiliza ocho segmentos de calibración. Además, los convertidores de analógico a digital (ADC) de 13 bits y los procesadores de 32 bits ayudan a eliminar cualquier error de cálculo y cuantificación que pueda ocurrir, proporcionando 12 bits de resolución de salida sobre el rango de medición.
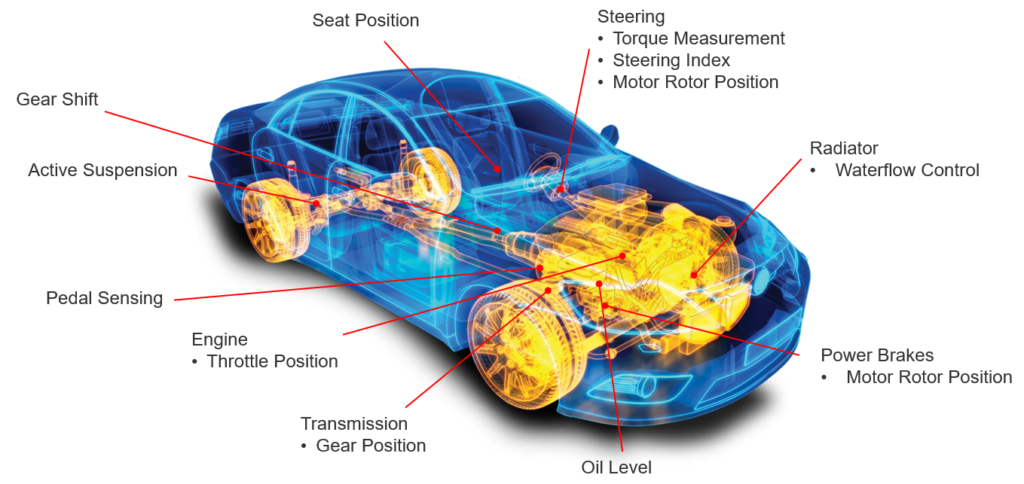
Ejemplo de aplicación de sensores inductivos de posición en un vehículo. Los sensores de posición inductivos son una solución más rentable que las soluciones de efecto Hall y magnetorresistivas porque proporciona detección de campo magnético sin un imán.
Obtenga más información sobre los sensores inductivos de Microchip Technology LX3301A y LX3302A en el siguiente link: https://www.microsemi.com/product-directory/inductive-sensor-interface/5482-inductive-sensor-evaluation-kits#overview




















{kind=link}