











 para velocidades de 1 terabit por segundo")
















Detecte el movimiento y los cambios ambientales con un sensor de infrarrojos pasivo (PIR) de la familia de MCU ATtiny.
En el mundo de la tecnología, los dispositivos de detección de movimiento se han vuelto cada vez más populares. Ahí es donde entra en juego la detección de movimiento por infrarrojos pasivos (PIR). Los sensores PIR son un tipo de sensor que absorbe pasivamente la radiación infrarroja (IR) en el campo de visión. Cuando cambia la cantidad de IR en el entorno, cambia la salida del sensor. Esto aparece como una pequeña señal de CA en un voltaje de modo común. Al monitorear el voltaje diferencial, que cancela la compensación de CC, se pueden detectar cambios en el entorno, como la entrada o salida de una persona.

La familia de microcontroladores ATtiny1627 contiene un convertidor analógico a digital diferencial (ADC) con un amplificador de ganancia programable (PGA), que puede proporcionar la interfaz analógica sensible para este sensor. El ADC de la familia ATtiny1627 puede alcanzar una resolución máxima de 17 bits mediante sobremuestreo, sin embargo, normalmente se utiliza a resoluciones de 12 bits.
Acondicionamiento e interconexión de sensores analógicos
Los ADC estándar de un solo extremo no pueden medir de manera confiable un sensor PIR directamente. La señal de CA (cuando está presente) es extremadamente pequeña y el voltaje de modo común de CC es muy grande. La salida del sensor PIR puede tratarse como una señal diferencial, en lugar de una señal medida con respecto a tierra. Antes de que la señal ingrese al ATtiny1627 para la amplificación y medición diferencial, se utilizan dos filtros de paso bajo RC (a diferentes frecuencias de atenuación) para crear los componentes «positivos» y «negativos» de la señal diferencial.
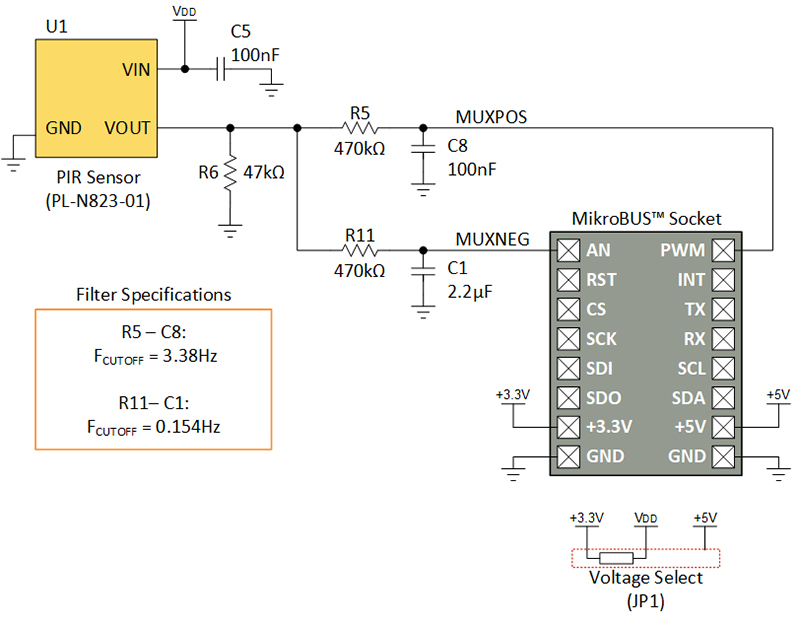
El filtro RC del lado positivo está construido a partir de una resistencia de 470 kΩ ohmios y un capacitor de 100 nF para una frecuencia de corte de 3,38 Hz. Este filtro deja pasar la señal de CA del sensor PIR y la polarización de CC mientras bloquea el ruido de alta frecuencia. El filtro RC del lado negativo está construido a partir de una resistencia de 470 kΩ y un condensador de 2,2 µF para una frecuencia de corte de 0,154 Hz. Este filtro está diseñado para pasar la polarización de CC mientras rechaza la señal de CA del sensor PIR.
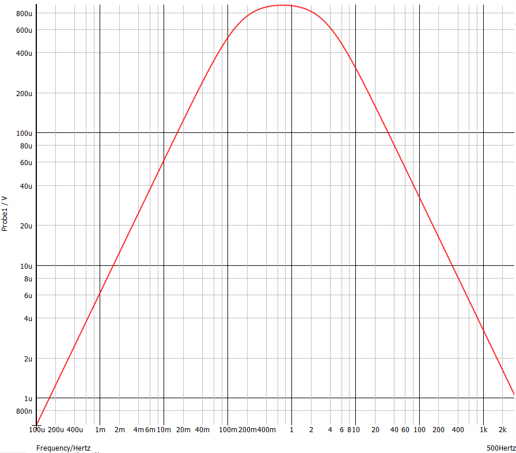
Los dos filtros de paso bajo crean un filtro de paso de banda efectivo: las frecuencias más bajas que la frecuencia de corte de ambos filtros aparecen en ambas entradas (menos las pérdidas de los filtros). Dado que el ADC es diferencial, estas señales se restan. Las señales que son más altas que ambas frecuencias de corte son muy atenuadas por los filtros RC, lo que minimiza su impacto. Finalmente, las señales que son atenuadas por un filtro y pasadas por el otro serán la señal de entrada más fuerte. La siguiente imagen muestra una simulación de la respuesta del filtro en MPLAB® Mindi ™ Analog Simulator.
Luego, el microcontrolador entra en una fase de calentamiento en la que inicializa 2 filtros digitales en el dispositivo: un filtro de promedio a corto plazo y un filtro de promedio a largo plazo. Estos filtros se utilizan para detectar movimiento a lo largo del tiempo. Durante el calentamiento, el LED parpadea a 1 Hz. Después de inicializar los periféricos y los filtros digitales, el microcontrolador entra en suspensión. En suspensión, el consumo de energía del microcontrolador es muy bajo, lo que prolonga la vida útil de la batería (para obtener más información sobre el consumo de energía con varias configuraciones, consulte la Nota de aplicación). El ADC se activa periódicamente sin despertar al microcontrolador a través de la señal PIT conectada en el sistema de eventos. Después de realizar la (s) conversión (es), el ADC despierta el microcontrolador activando una interrupción. El microcontrolador actualiza los filtros digitales con el valor del ADC. Para determinar si se ha producido movimiento, el microcontrolador compara la diferencia entre los filtros de corto y largo plazo para ver si pasa un umbral. Si se excede el umbral, se detecta movimiento y la línea de E / S de LED se conecta a una señal de 4 Hz del PIT.
La familia ATtiny1627 de MCU AVR® está equipada con un ADC diferencial rápido y periféricos independientes del núcleo basados en hardware para un funcionamiento de baja potencia en aplicaciones de control en tiempo real y nodos de sensores. Para comenzar a desarrollar con esta familia, está disponible el kit de evaluación ATtiny1627 Curiosity Nano (DM080104). Este kit de evaluación compacto es perfecto para crear rápidamente un prototipo de su nodo sensor, control en tiempo real u otra aplicación.
La placa se integra a la perfección con MPLAB® X, Microchip Studio e IAR Embedded Workbench Integrated Development Environments (IDE) para adaptarse mejor a su forma de trabajo. Conéctelo a una placa de pruebas o combínelo con la base Curiosity Nano para placas Click ™ (AC164162) para agregar enchufes mikroBUS ™ para incorporar fácilmente sensores, actuadores o interfaces de comunicaciones en su diseño. Este es solo un ejemplo de la flexibilidad de los productos de la familia ATtiny1627 de MCU AVR.
Fuente:
https://www.microchip.com/en-us/about/blog/learning-center/pir-motion-sensing-with-the-attiny1627-mcu-family




















{kind=link}